- 廠家供應
- 大量現貨
- 可開發票
服務熱線:
18691898759服務熱線:
18691898759
產品分類
Products 更新時間:2026-03-05
更新時間:2026-03-05  瀏覽次數:17
瀏覽次數:17實驗名稱:基于EMD綜合模型的壓電MFC執行器致動的柔性懸臂梁寬頻帶線性化控制
實驗目的:驗證基于MPI模型的前饋和復合線性化控制方法能否有效降低壓電MFC執行器低頻遲滯特性對柔性懸臂梁輸出位移精度的影響,同時驗證基于EMD綜合模型的前饋和復合線性化控制方法能否補償寬頻帶內遲滯、蠕變及結構動力學特性的綜合影響,通過對比兩種控制方法中前饋與復合控制的效果,實現柔性懸臂梁寬頻帶輸入-輸出關系的線性化,提升其輸出位移精度,為壓電MFC執行器致動系統的寬頻帶高精度非線性控制提供實驗支撐。
測試設備:ATA-2041高壓放大器、壓電MFC執行器致動的柔性懸臂梁、計算機、測振儀控制器、實時仿真系統、測振儀光學頭。
實驗過程:搭建了壓電MFC執行器致動的柔性懸臂梁主動控制實驗裝置,先通過MPSO算法確定基于MPI模型的前饋和復合線性化控制器,在低頻驅動信號下測試并驗證其對遲滯特性的補償效果;再建立基于EMD綜合模型的控制方法,將動態力學模型簡化為四階模型并構建偽逆模型,整定PI反饋參數,在5-30Hz寬頻帶諧波信號下測試,對比未控制、前饋及復合控制的滯回曲線與線性化誤差,驗證兩種控制方法在低頻和寬頻帶場景下的有效性。

圖1:系統控制框圖
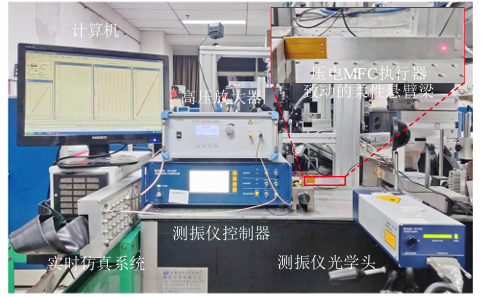
圖2:實驗平臺
實驗結果:
1、基于MPI模型的前饋和復合線性化控制均能有效降低壓電MFC執行器低頻遲滯特性對柔性懸臂梁輸出位移精度的影響,且復合控制的非線性度降低效果更優。
2、基于EMD綜合模型的前饋和復合線性化控制可有效補償寬頻帶內遲滯、蠕變及結構動力學特性的綜合影響,實現柔性懸臂梁寬頻帶輸入-輸出關系的線性化。
3、基于EMD綜合模型的復合控制相較于前饋控制,在不同驅動電壓頻率下非線性度最大降低50.69%、最小降低22.19%,寬頻帶線性化控制精度更優。
4、柔性懸臂梁動態力學模型由七階簡化為四階后,與實驗數據在幅頻和相頻響應上仍保持較高吻合度,可穩定用于寬頻帶線性化控制。
5、反饋回路的引入能有效消除前饋控制中因模型誤差和外界干擾產生的偏置誤差,但在驅動電壓頻率較高時,反饋控制的實時性會對控制精度產生一定影響
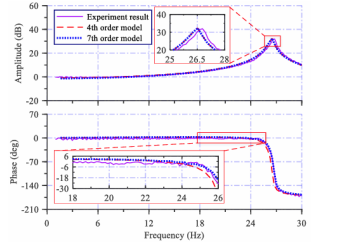
圖3:七階系統、四階系統和實驗數據的頻率響應對比曲線

圖:ATA-2041高壓放大器指標參數
本資料由Aigtek安泰電子整理發布,更多案例及產品詳情請持續關注我們。西安安泰電子Aigtek已經成為在業界擁有廣泛產品線,且具有相當規模的儀器設備供應商,樣機都支持免費試用。
 我的位置:
我的位置: